Prof. em Christophe Girot | Landschaftsarchitektur
Die Topologie der robotergestützten Landschaftsgestaltung
Die Dissertation befasst sich mit grossflächigen Geländestrukturen im Bereich der Landschaftsarchitektur. Sie baut auf den jüngsten Fortschritten im Bereich mobile Robotersysteme und digitale Landschaftsfabrikation. Durch die Manipulation eines Geländes mit Hilfe eines robotergesteuerten Endeffektors untersucht sie die Organisation von räumlichen Beziehungen und Leistungen innerhalb von Oberflächenstrukturen. Form und Prozess werden bei der Untersuchung der Formgebung von losen und körnigen Materialien gleichsam berücksichtigt. Diese Forschung stellt einen ersten, aber äusserst wichtigen Schritt in Bezug auf neue Entwurfsmethoden und Konstruktionstechniken für eine robotergestützte Landschaftsfabrikation dar.
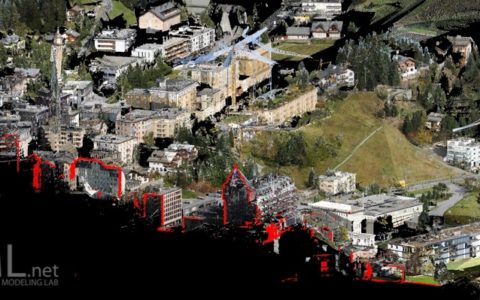
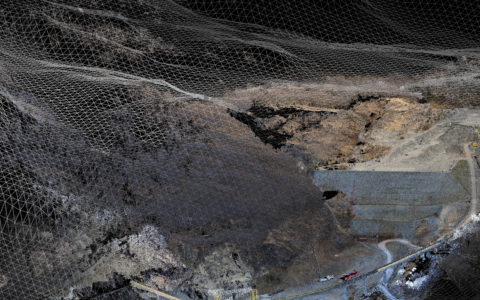
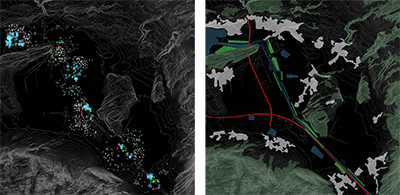
Die Dissertation ist Teil des interdisziplinären Forschungsprojektes «Robotic Construction with Found Materials», das vom NFS Digitale Fabrikation unterstützt wird: eine Zusammenarbeit des Lehrstuhls für Landschaftsarchitektur von Prof. Christophe Girot, des Lehrstuhls für Architektur und digitale Fabrikation von Fabio Gramazio und Matthias Kohler und des Robotic System Lab von Prof. Marco Hutter an der ETH Zürich. Sie erforscht die Geländemodellierung durch mobile Roboter, die Technologien und Topologien für den automatisierten Landschaftsbau mit bisher unerreichter Präzision mit Hilfe autonomer Schreitbagger ermöglicht. Die Roboterplattform besteht aus einem Menzi Muck M545 Roboter-Schreitbagger mit Kraftaktuatoren als neuartigem Ansatz zur Planung und Steuerung eines Robotersystems. Um die Fähigkeiten der Roboterplattform zu nutzen, wird ein rechnergestütztes Konstruktionsverfahren für lose und körnige Materialien unter Verwendung einer erweiterten Punktwolken-Modellierung entwickelt. Die hier vorgestellte Forschung beschäftigt sich mit dem noch jungen Bereich der digitalen Landschaftsfabrikation und wird den Gestaltungsraum für eine fortschrittliche robotergestützte Geländemodellierung untersuchen.
Das Hauptziel dieser Dissertation ist, das Potential der robotergestützten Vor-Ort-Bau-methoden für die Landschaftsarchitektur zu untersuchen und konzentriert sich auf spezifische topologische Anwendungen mit lokal verfügbaren Materialien. Sie entwickelt neue Entwurfsmethoden, die auf den robotergestützten Fähigkeiten eines automatisierten Schreitbaggers beruhen. Nach topologischen Methoden der Landschaftsarchitektur untersucht diese Forschung nun fortgeschrittene rechnergestützte Entwurfs- und Konstruktionsprozesse. Dieser Ansatz wird durch Experimente in drei Forschungs- & Designstudios und auf einer neuen Roboterplattform validiert, die auf spezifische Aufgaben für einen ausgewählten Standort eingehen. Die Entwicklung neuer rechnergestützter Entwurfswerkzeuge und Modellierungsprozesse wird das architektonische Potential der robotergestützten Geländemodellierung und das umfassendere Feld der digitalen Landschaftsarchitektur insgesamt anregen. Die automatisierte Geländemodellierung mit mobilen Robotersystemen öffnet ein enormes Potential für neue Landschaftsgestaltungen, indem sie erstmals fortschrittliche Vorfertigungstechniken vor Ort einsetzt. Daher untersucht und identifiziert diese Forschung das Potential spezifischer Topologien dieser neuen Bauweise für die digitale Landschaftsgestaltung.

Kontakt
Leitung
Prof. Christophe Girot
Projektlaufzeit
laufend
Finanzierung
NCCR Digital Fabrication, ETH Zürich